Beschleunigungssensor > Acceleration Sensor (ACC)
Möchte ja keine Werbethread hier draus, sondern eine Diskussion über die Technologie,
aber kurze Zusammenfassung (ich bin natürlich ein Fan davon, sonst hätte ich nicht
soviel arbeit da reingesteckt)
[Werbung an]
Den stabilen Modus nenne wir Heading-Restore, schwebe Video sind ja oben zu sehen,
ist aber nicht das was zähl. Der Heli hat 0 Eigenleben und läßt sich Zentimetergenau
navigieren (Rundflug im Wohnzimmer). Flieg damit gerne im Gelände, Wald etc,
viel Spannender als auf freiem Feld. Windstabilität ist enorm, bei 10kts laut
windfinder.com ist das noch annehm und man genießt den Fahrstul wenn man
in Windrichtung wendet.
Drück ich den Giersteueknüppel 5sek nach links (Motor aus) zuckt die Taumlscheibe,
und bin im Heading-Hold Modus (FBL). Mit den ADXRS kommen die Integrale ungekürzt
zum Einsatz = maximale Stabilität. Fliegt sich wie Vstabi Modus Präzise in einem etwas
größeren Modell. HH geht hier gut bis 12kts, stellt man einfach in den Wind.
Heck ist Gy401 like (neuerdings), hab ich da lange für gebraucht hinter die Regelung zu steigen,
brauch man auch für die krasse Regelung auf der TS und für Videos, da sieht man
jedes Mini-Zittern und jede Schwäche.
Gerade gute Piloten (Training 2 Jahre +) stehen dem Heading-Restore Modus etwas skeptisch gegenüber
(auch hier einige Testpiloten
man sonst nicht machen (Allgemeine Präzision und Handling, für Video, Fliegen am
Rande des Sichtfelds, immer dicht am Gelände, später auch mit GPS etc.),
und es sieht in der Luft immer absolut ruhig aus. Nicht wie ein 450er. Bewegt sich
souverän. (Gute Piloten schaffen das Flugbild auch im HH Modus aber nicht mit
Hindernissen)
Gut
[Werbung aus]
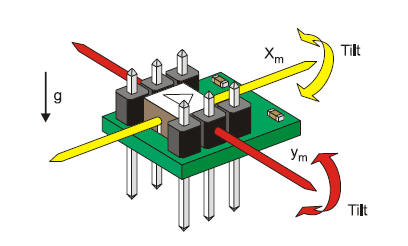
Ok, zurück zum Thema. Der ACC mißt Beschleunig auf drei Achsen. Darüber kann
man über atan2() exakt den Lagewinkel berechnen (eine bevel box hat z.B. nur einen ACC drinne).
Ist aber im Flug sehr ungenau. Es gibt ja noch andere Kräfte wie Fliehkräfte, Vibs usw.
all das mißt auch der ACC.
Man hat also immer zwei Lageinfos im Flug
- vom ACC - ohne Drift aber ungenau (gerade in Kurven)
- von den Gyros - mit Drift aber super präzise
Die Verrechnung dieser beiden Infos ist die eigentliche Arbeit. Wir machen das
mit einem Kalman-Filter bei dem man den Gain (Grad der Angleichung) variabel
verändern kann. In Kuven (ACC liefert nicht mehr richtige Winkelinfos, da
Fliehkräfte) schalten wir die Angleichung runter (ganz einfach über die
Steuerknüppelstellung). Der Rest ist PID, ein Taumelscheibenmischer,
die Servotimer (nur schnelle Digi-Servos machen wirklich Sinn) und
das wars im Grunde.
Viele Grüße











