Hallo zusammen
hab mein Dritten Copter auch fertig
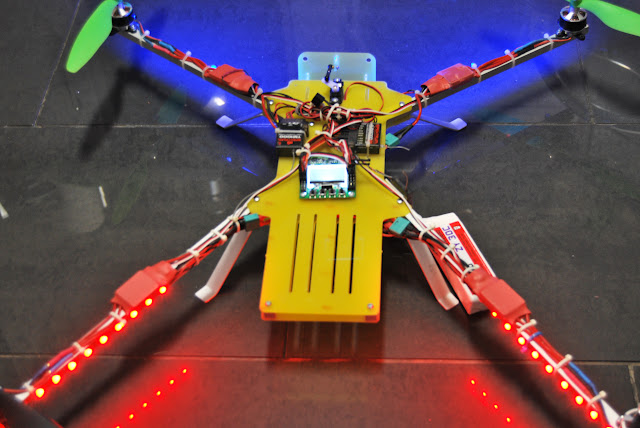
das Borad und die Regler stammen vom Hobby King, die Motore hab ich an der Messe in friedrichshafen besorgt.
das sind 44gr ausenläufer mit 980KV.
den rest sieht man ja auf den Bildern.
er fliegt bis jetzt recht ansändig ich muste nur die RC auf das borad einstellen und das wars auch schon
So, hier ist mal wieder mein Hexa. Nun in der Finalen Version...grins
Dazugekommen sind:
Neue Motoren
Feiyu Hornet OSD mit GPS
Sony 600...FPV Cam
FatShark Sender CL Antenne
Am Platz ist die Bodenstation....
2 Stück ImmersionRC UNO5800V2 als Videodiversity
EagleTree Groundstation
7" TFT FPV Monitor
DVR Recorder zum FPV Flug aufnehmen SPW und Helix Antennen
IMAG0773.jpg (1.17 MiB) 2271 mal betrachtet
Fotos und Videos werden mit der GoPro gemacht, geflogen wird mit der Sony
Hier mal paar Aufnahmen
Hmm, den nicht symmetrischen Frame kann man per Mixer noch optimieren, wobei der schon extrem breit und kurz ist. Aber Nico hat schon recht: Dass der AQ nicht im Zentrum sitzt, könnte durchaus zu Problemen führen.
Probleme würde ich weniger vermuten, aber evtl. Präzisionsverlust. Das AQ wird ja nicht ohen grund mit speziellem Prozedere eingelernt , wenn es außerhalb des CG sitzt dürften vmtl. Abweichungen in der Berechnung der Winkelgeschwindigkeit auftreten, insbesondere auch Nick-Kommandos. Allerdings ist das rein spekulativ, da ich selber keinen AQ habe, ist nur rein aus prinzipiellen Ansichten heraus betrachtet.
_________________________________________________________________________________ "Leben ist das, was passiert, während du etwas ganz anderes planst" ... ( John Lennon )
Crizz hat geschrieben:Probleme würde ich weniger vermuten, aber evtl. Präzisionsverlust.
Wenn ich mir so eine Flugsteuerung kaufe und mir die ganze Mühe mit der Kalibrierung mache, dann doch gerade wegen der Präzision. Daher fände ich Präzisionsverlust schon als ein Problem.
_________________________________________________________________________________ "Leben ist das, was passiert, während du etwas ganz anderes planst" ... ( John Lennon )
Danke für die Hinweise, aber das Bild trügt etwas, es ist tatsächlich sehr kurz, aber die Abstände der Motoren zum CG und zu den Achsen sind bis auf 1-2 Zentimetern gleich.
Der Autoquad ist auch auf den CG, nur der GPS mit seinen Shield liegt nicht darüber sondern ist verstetzt, weil es mir so besser gefiel. Sollte es euer Meinung nach zu Probleme bzw. Präzisionsverlust führen, dann kann ich es natürlich auch weiter nach hinten direkt über den AutoQuad versetzen.
Der TBS Discovery ist auch sehr asymetrisch - meiner fliegt trotzdem ohne Spezialmixer super genial. Da kann die Theorie noch sowas anderes sagen, die Praxis interessiert das kaum.
Würd es mir auf absolute Präzision ankommen, dann wäre evtl. sogar die KreuzConfig einer X-Config vorzuziehen, da damit die Achsen nicht über 2 evtl. unterschiedlich laufende Motor/Regler Systeme bewegt werden.